PhotoRobot Laser Sentrering & Belyning Gids
Hierdie gebruikersondersteuningshandleiding verskaf tegniese instruksies oor hoe om PhotoRobot ingeboude kruislaserstelsels in lyn te bring en te sentreer. Volg hierdie stappe om die middelpunt van enige ronde PhotoRobot-plaat met twee lasers te vind. Instruksies sluit in hoe om die lasers fisies na die middel van die tafel te skuif, aanvanklike laserinstellings en hoe om laserposisionering te verfyn. Daarbenewens is daar aan die einde van die handleiding instruksies vir die belyning en sentrering van die spesiale laserstelsel van die C1300-draaitafel (voorheen versprei onder die naam Case 1300).
Belangrik: Verwys altyd eers na PhotoRobot Veiligheidsinligting en -instruksies bykomend tot die handleiding wat spesifiek by u toestel voorsien word voor enige selfinstallasie of diens.
Nota: Verwys na PhotoRobot First Use & Basic Testing vir gedetailleerde inligting oor netwerkkonfigurasie en netwerkvereistes.
1. Beweeg lasers fisies na die middel van die tafel
1.1. Voordat jy begin, vestig 'n verbinding tussen die PhotoRobot en die plaaslike netwerk. Skakel dan die beheereenheid (6de generasie) en 'n laserboks aan.
Nota: Om die laserstelsel vir die C1300-draaitafel in lyn te bring en te sentreer, verwys ook na die spesiale instruksies in afdeling 4 van hierdie gebruikershandleiding.
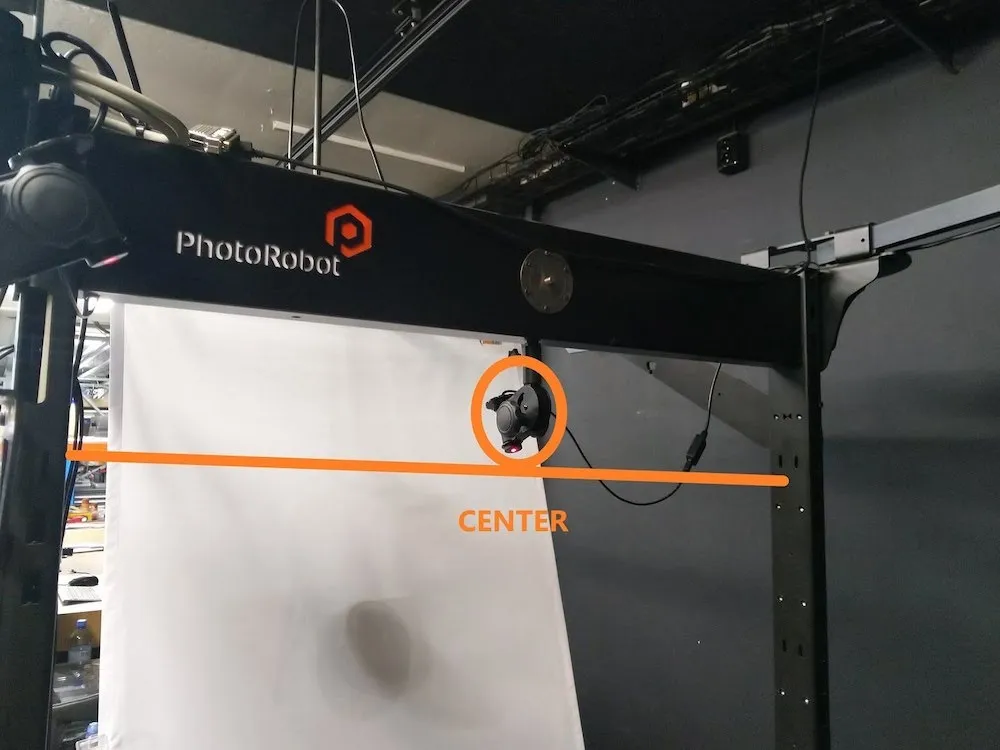
1.2. Nadat u PhotoRobot aan die netwerk gekoppel het en die beheereenheid en laserboks aangeskakel het, meet die afstand tussen beide kante van die tafel waar die laser gemonteer is. Draai of beweeg dan die laser met die hand na die middel en maak die laser in posisie vas.
2. Skat rowwe instellings
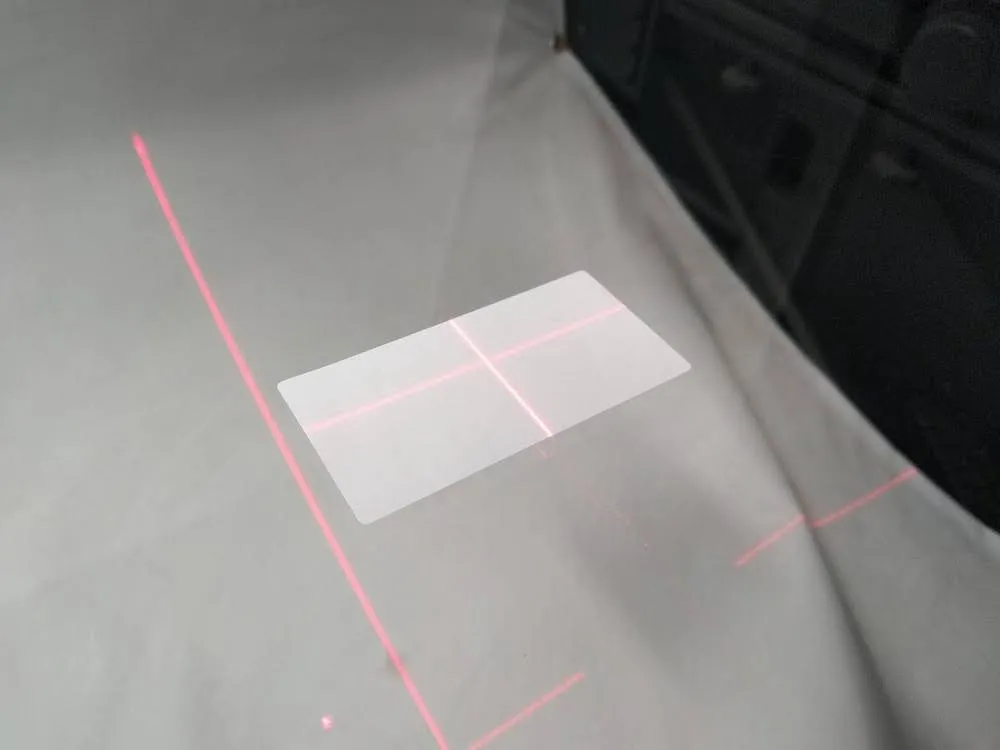
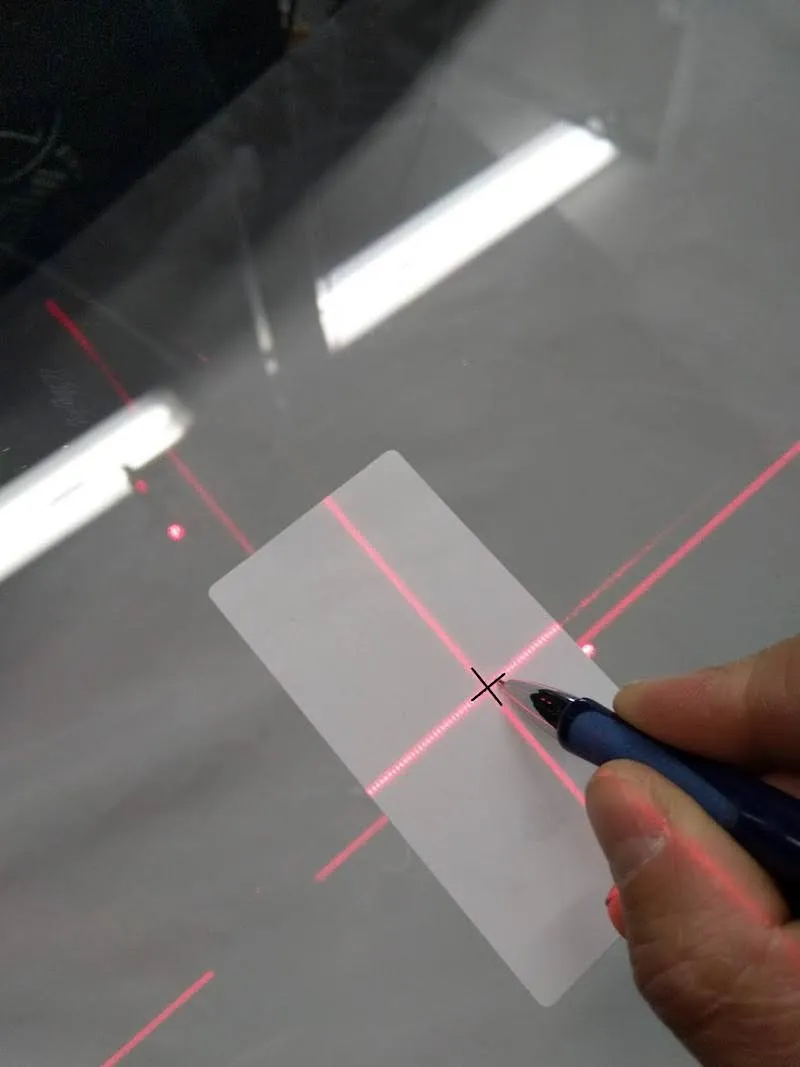
2.1. Wanneer die laser in posisie vasgemaak is, plaas 'n plakker op die draaitafelplaat op die benaderde middelpunt van die glas. Die lasers sal meer sigbaar word op die plakker, wat help om die sentrale punt van die plaat beter te skat.
2.2. Pas albei lasers met die hand aan om op die plakker in lyn te wees wat die benaderde middelpunt skat.
3. Verfyn laserbelyning
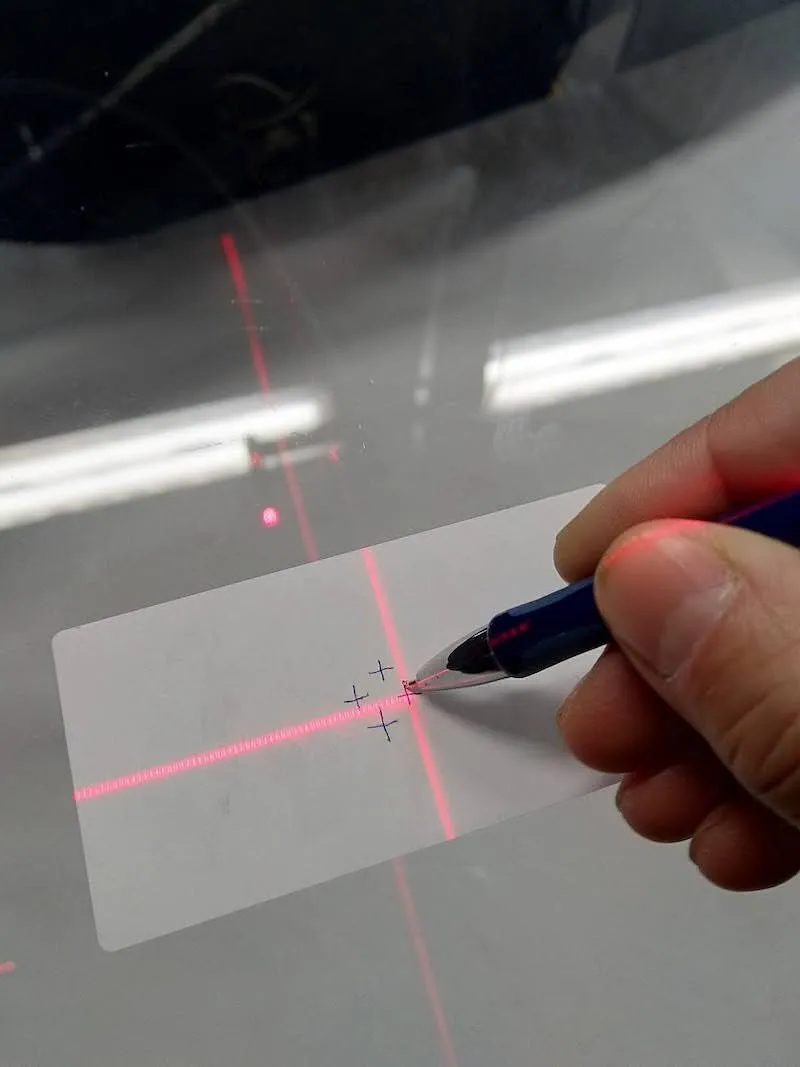
3.1. Trek 'n klein kruisie op die plakker wat die rooi kruis van lasers kopieer.
3.2. Begin dan die Locator-toepassing op jou selfoon, soek die beheereenheid wat aan die robot toegewys is, en kry toegang tot die diens GUI. Nota: Vir gedetailleerde instruksies oor netwerke, verwys na PhotoRobot Gedetailleerde netwerkvoorvereistes (afdeling 8: Aanhangselinligting). Soek dan die beheereenheid wat aan die robot toegewys is, en kry toegang tot sy GUI.

3.3. Gebruik die draaikontroles in die Service GUI om die glas 90 grade te draai, en trek die posisie van die kruislasers weer op die plakker. Herhaal hierdie stap twee keer: draai die glas 90 grade, spoor die laserkruis op, draai 90 grade en spoor die laserkruis 'n laaste keer op.
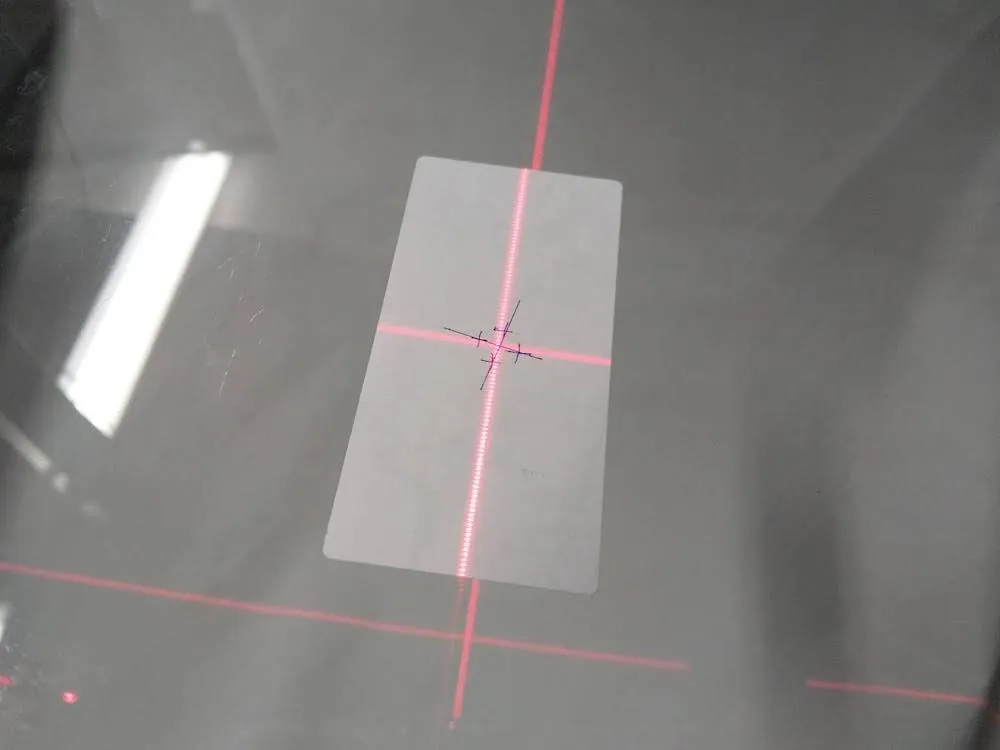
3.4. Nadat u die vier kruise op die plakker opgespoor het, verbind elke teenoorgestelde kruis met reguit lyne. Die gevolglike kruising tussen die individuele kruise sal die werklike middelpunt van die glasplaat verteenwoordig.
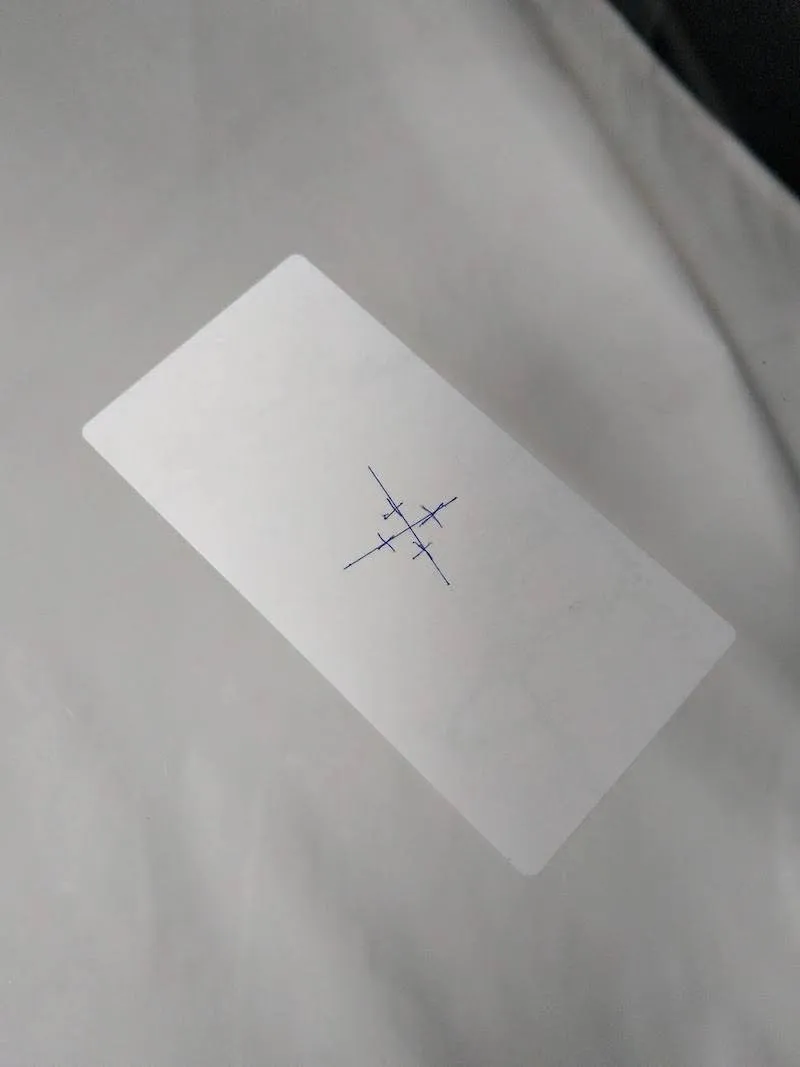
3.5. Pas laastens albei lasers aan by die geïdentifiseerde middelpunt. Die laserstelsel sal nou gesentreer en in lyn wees met die absolute middelpunt van die plaat se rotasie.
4. C1300 Spesiale Lasers Belyning en Sentrering
4.1. Let op die spesiale laserstelsel wanneer u die lasers op die C1300-robot in lyn bring en sentreer. Die C1300-laserstelsel het verskeie verskille in vergelyking met ander PhotoRobot's. Alhoewel die fisiese beginsels dieselfde is, bevat die konstruksie van die C1300-laserstelsel 'n installasie van vier lasers.
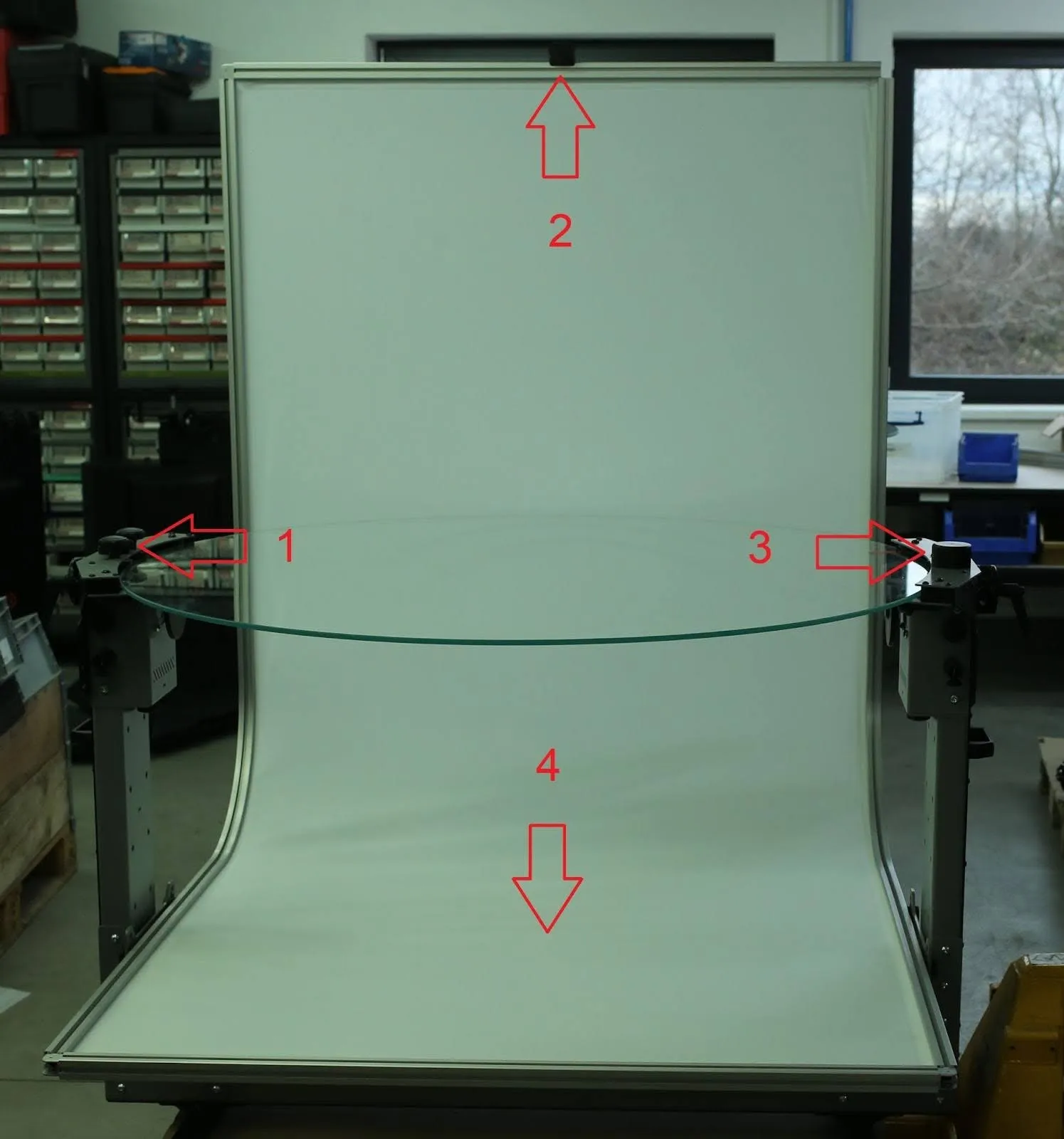
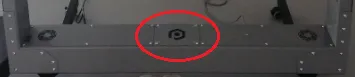
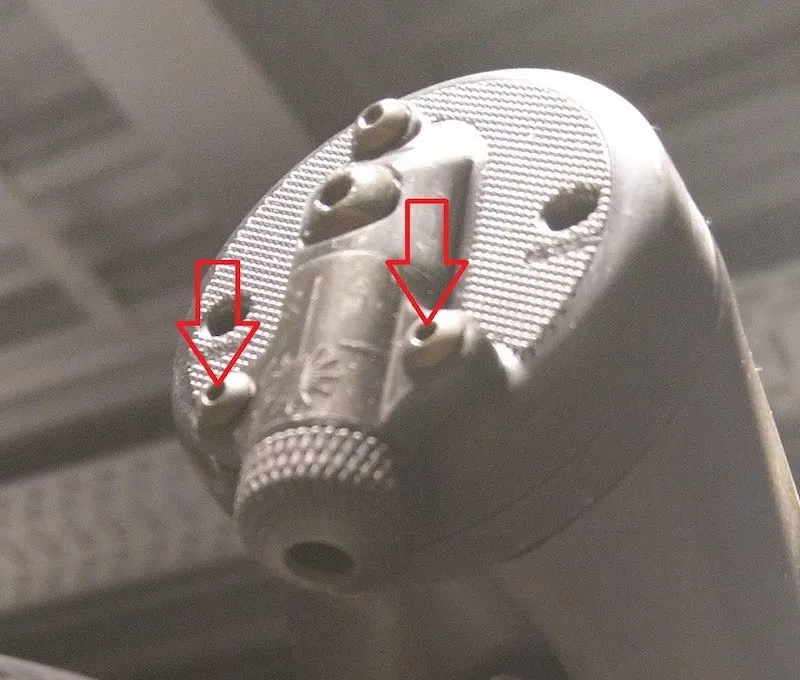
4.2. In hierdie stelsel is Laser 4 'n integrale deel van die C1300-robotskelet. Laser 4 is 'n kruislaser, en dit skyn deur die wit agtergrond van die onderkant. Om die laserposisie aan te pas, vind die vier silwer skroewe om die sentrale vierkantige deel wat die laser huisves, te ontbloot.
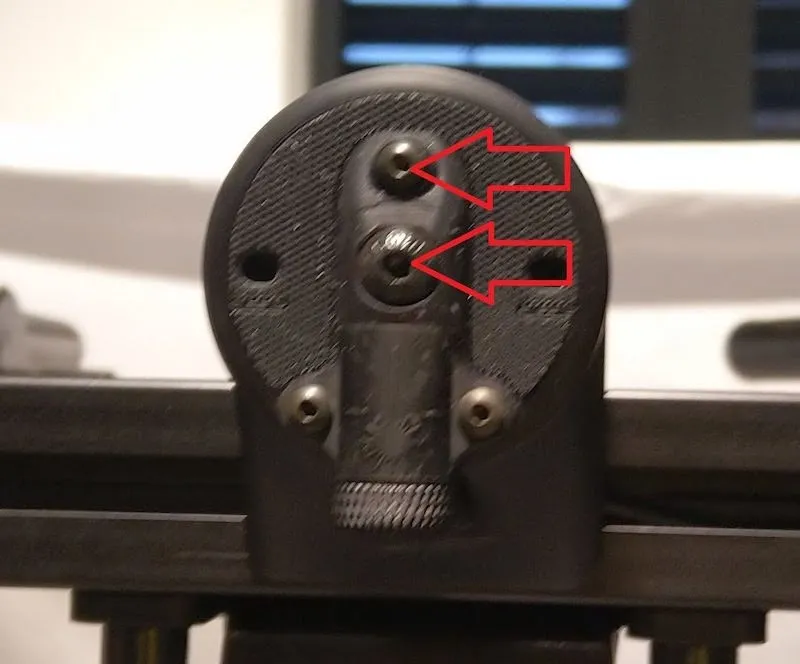
4.3. Nadat u die sentrale vierkantige deel van die behuising Laser 4 ontbloot het, gebruik die twee skroewe wat die plastieklaserbehuising vashou om die posisie met die hand aan te pas.
Nota: Laser 1, Laser 2 en Laser 3 het almal dieselfde konstruksie as Laser 4. Hulle is ook almal lynlasers:



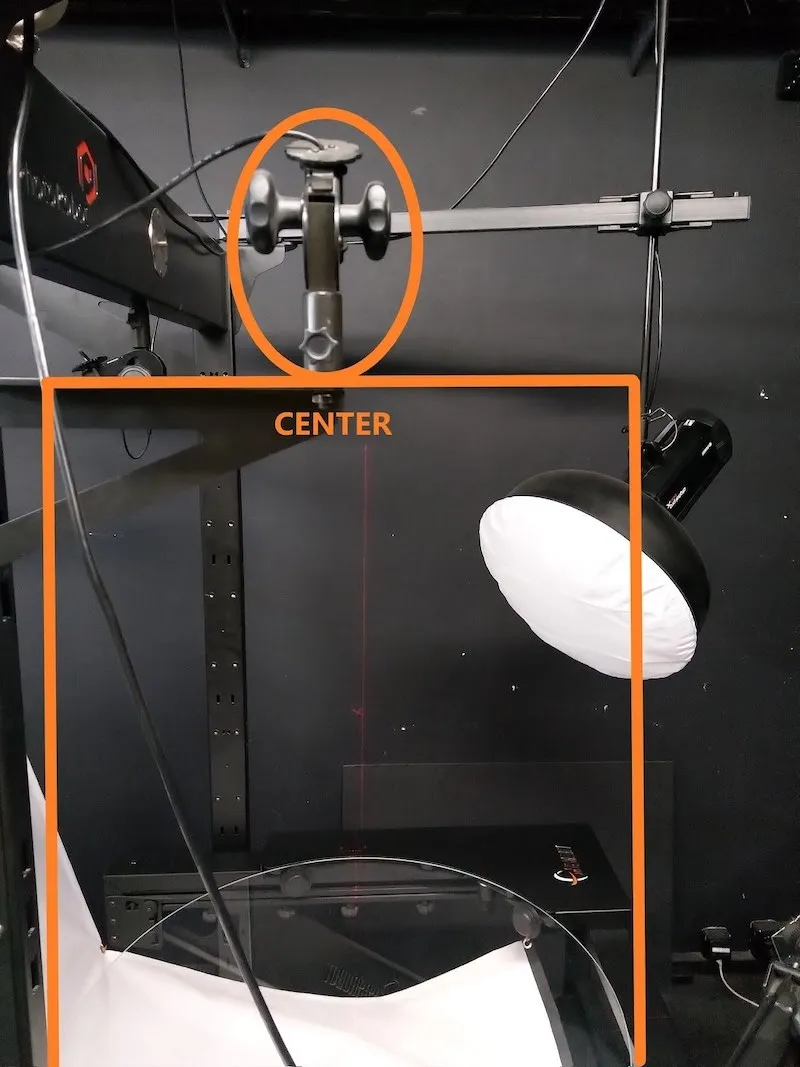
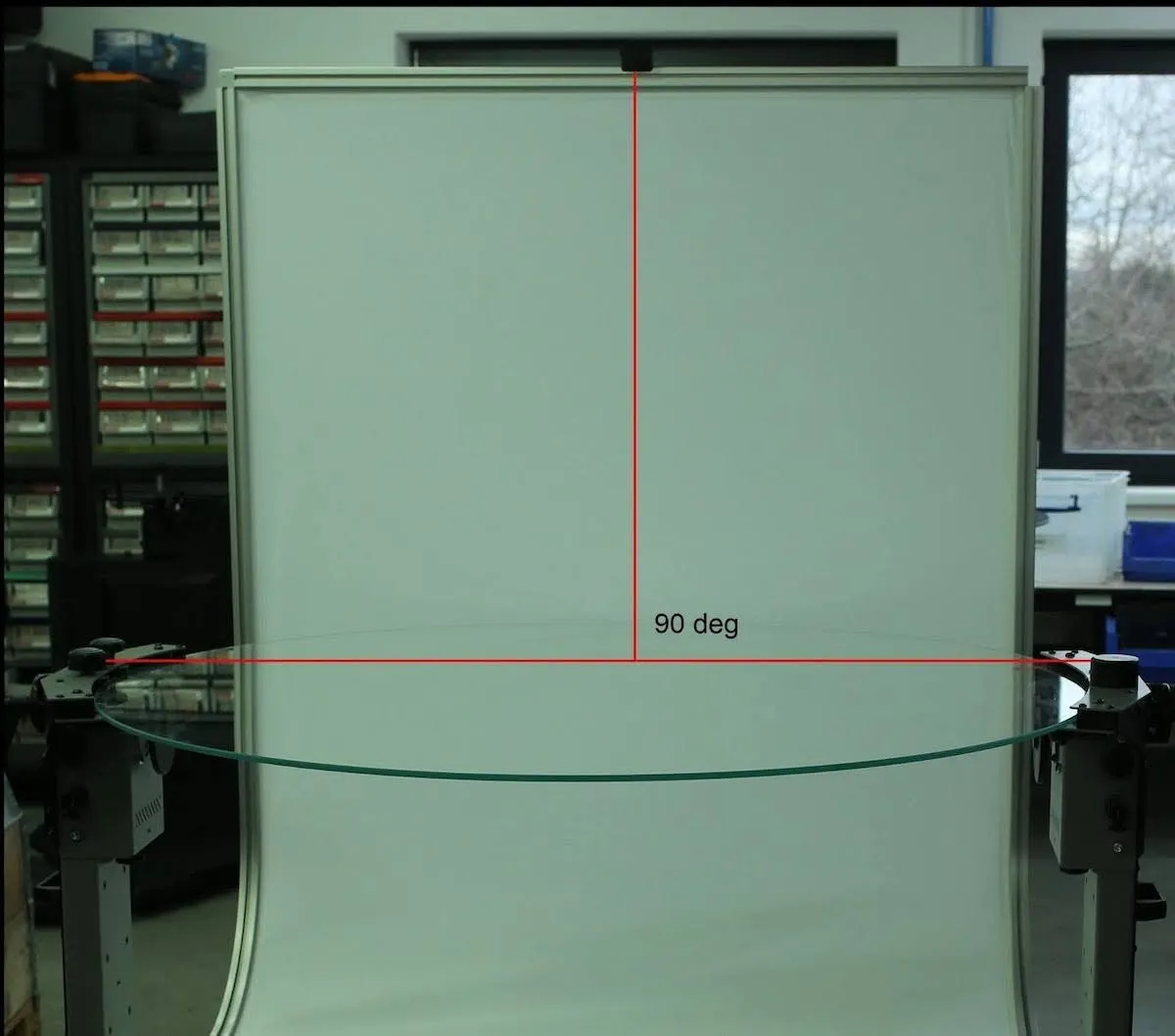
4.4. Laastens, wanneer jy die lasers in lyn bring en sentreer, maak seker dat daar 'n hoek van 90 grade tussen die laserlyn vanaf die boonste laser en die glasplaat is.


EOS Rebel-reeks


EOS DSLR-reeks


EOS M spieëllose reeks


PowerShot-reeks


Close-up / Handheld

Die Canon EOS Rebel-reeks bied beginnersvriendelike DSLR-kameras met soliede beeldkwaliteit, intuïtiewe kontroles en veelsydige kenmerke. Hierdie kameras is ideaal vir fotografie-entoesiaste en bied betroubare outofokus, wisselhoekige raakskerms en Full HD- of 4K-video-opname.
Verbinding
Resolusie (MP)
Resolusie
Die Canon EOS DSLR-reeks lewer beelde van hoë gehalte, vinnige outofokus en veelsydigheid, wat dit ideaal maak vir beide fotografie en videoproduksie.
Verbinding
Resolusie (MP)
Resolusie
Die Canon EOS M Mirrorless-reeks kombineer kompakte ontwerp met DSLR-agtige werkverrigting. Met verwisselbare lense, vinnige outofokus en beeldsensors van hoë gehalte, is hierdie kameras ideaal vir reisigers en inhoudskeppers wat draagbaarheid soek sonder om beeldkwaliteit in te boet.
Verbinding
Resolusie (MP)
Resolusie
Die Canon PowerShot-reeks bied kompakte, gebruikersvriendelike kameras vir toevallige skuts en entoesiaste. Met modelle wat wissel van eenvoudige wys-en-skiet tot gevorderde zoomkameras, bied hulle gerief, soliede beeldkwaliteit en kenmerke soos beeldstabilisering en 4K-video.
Verbinding
Resolusie (MP)
Resolusie
Die Canon Close-Up & Handheld Cameras is ontwerp vir gedetailleerde, nabye fotografie en video. Kompak en maklik om te gebruik, hulle bied presisiefokus, hoë-resolusie-beelding en veelsydige makro-vermoëns - perfek vir vlogging, produkfotografie en kreatiewe nabyskote.


